
 L’approccio microkernel consiste nel definire un kernel principale che fornisce esclusivamente un set di primitive o chiamate di sistema per implementare servizi minimali del sistema operativo quali gestione dei thread, spazi di indirizzamento o comunicazione interprocesso. Sopra tale kernel minimale (da cui il prefisso “micro”) vengono innestati dei server, ovvero programmi separati dal kernel che comunicano con questo tramite le suddette chiamate di sistema per implementare le varie funzionalità del sistema.
L’approccio microkernel consiste nel definire un kernel principale che fornisce esclusivamente un set di primitive o chiamate di sistema per implementare servizi minimali del sistema operativo quali gestione dei thread, spazi di indirizzamento o comunicazione interprocesso. Sopra tale kernel minimale (da cui il prefisso “micro”) vengono innestati dei server, ovvero programmi separati dal kernel che comunicano con questo tramite le suddette chiamate di sistema per implementare le varie funzionalità del sistema.
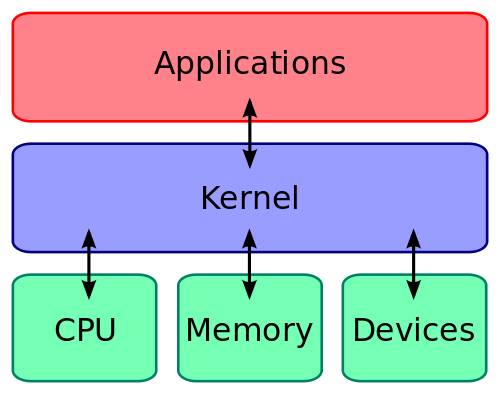
 Rappresentazione grafica di un kernel ibrido
Rappresentazione grafica di un kernel ibrido
Apri un sito e guadagna con Altervista - Disclaimer - Segnala abuso - Mappa del Sito - Notifiche Push - Privacy Policy - Personalizza tracciamento pubblicitario
